Flow Matching and Diffusion Models( MIT 6.S184 )
July 28, 2025 Leave a comment
I transcribe MIT 6.S184: Flow Matching and Diffusion Models – Lecture – Generative AI with SDEs. I try to do this using Tikz diagrams too.
tl:dr
- Ordinary Differential Equations have to be studied separately.
- Stochastic Differential Equations is a separate subject.
- I believe that I need to solve the exercises by coding to understand everything reasonably well.
Lecture 1
Conditional generation means sampling the conditional data distribution.

Generative models generate samples from data distribution.
Initial Distribution : 
Default is
Flow Model
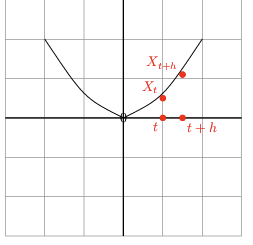
Trajectory ![{ X : \overbrace{[0,1]}^\text{Time component} \rightarrow \mathbb{R}^D} , t \rightarrow X_t](https://s0.wp.com/latex.php?latex=%7B+X+%3A+%5Coverbrace%7B%5B0%2C1%5D%7D%5E%5Ctext%7BTime+component%7D+%5Crightarrow+%5Cmathbb%7BR%7D%5ED%7D+%2C+t+%5Crightarrow+X_t+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Vector Field. ![{ u : \mathbb{R}^D x [0,1] \rightarrow \mathbb{R}^D}](https://s0.wp.com/latex.php?latex=%7B+u+%3A+%5Cmathbb%7BR%7D%5ED+x+%5B0%2C1%5D+%5Crightarrow+%5Cmathbb%7BR%7D%5ED%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Flow
![{ \psi \bullet \mathbb{R}^D x [0,1] \rightarrow \mathbb{R}^D}](https://s0.wp.com/latex.php?latex=%7B+%5Cpsi+%5Cbullet+%5Cmathbb%7BR%7D%5ED+x+%5B0%2C1%5D+%5Crightarrow+%5Cmathbb%7BR%7D%5ED%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)


.The time derivative of 

Neural Network.
![{ {{\psi}_t}^{\theta} \mathbb{R}^D x [0,1] \rightarrow \mathbb{R}^D}](https://s0.wp.com/latex.php?latex=%7B+%7B%7B%5Cpsi%7D_t%7D%5E%7B%5Ctheta%7D+%5Cmathbb%7BR%7D%5ED+x+%5B0%2C1%5D+%5Crightarrow+%5Cmathbb%7BR%7D%5ED%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Random Initialization

Ordinary Differential Equation 
Goal Simulate to get


This means that Flow is a collection of Trajectories that conform to the ODE
Diffusion Model
Stochastic Process


![{ X : [0,1] \rightarrow \mathbb{R}^D , t \rightarrow X_t}](https://s0.wp.com/latex.php?latex=%7B+X+%3A+%5B0%2C1%5D+%5Crightarrow+%5Cmathbb%7BR%7D%5ED+%2C+t+%5Crightarrow+X_t%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Vector Field.
Stochastic Differential Equation

The following means that the change of 



Brownian Motion
Stochastic Process 

- It has Gaussian increments. What does it mean ?


These are two arbitrary time points and t is before s, 
3. Independent increments. This means that

So at this stage, in order to understand the following, I need a book or another course in ODE’s

This means the trajectory with ODE 


How are derivatives defined ?
This is the basic definition that I have to understand by learning Calculus.
Derivative of a trajectory 


And by applying linear algebra we get the ODE shown above( this section ).
Ordinary Differential Equation to Stochastic Differential Equation

![\Leftrightarrow X_{t+h} = X_t + h u_t (X_t) + \sigma_t \underbrace{(W_{t + h} - W_t)}_\text{Brownian Motion} + h R_t(h) \left( \displaystyle\lim_{h \to 0} \mathbb(E)[\sqrt {\lVert {R_t(h)} \rVert_2^2}] =0 \right)](https://s0.wp.com/latex.php?latex=%5CLeftrightarrow++++X_%7Bt%2Bh%7D++%3D+X_t+%2B+h+u_t+%28X_t%29+%2B+%5Csigma_t+%5Cunderbrace%7B%28W_%7Bt+%2B+h%7D+-+W_t%29%7D_%5Ctext%7BBrownian+Motion%7D+%2B+h+R_t%28h%29++%5Cleft%28+%5Cdisplaystyle%5Clim_%7Bh+%5Cto+0%7D+%5Cmathbb%28E%29%5B%5Csqrt+%7B%5ClVert+%7BR_t%28h%29%7D+%5CrVert_2%5E2%7D%5D+%3D0+%5Cright%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
This is the recap. We found a term that doesn’t depend on the derivatives that can be specified with an error term. 
Why do we need Brownian Motion ?
I didn’t really follow this. But the answer given was this. The Brownian Motion is equivalent to the Gaussian Distribution as far its universal value is concerned
Lecture 2
Reminder of what was covered in Lecture 1
![\fbox{\begin{minipage}[t][.5cm]{0,4\textwidth} {\textbf{Flow Model}} \end{minipage}} \qquad {P_{init}} {\textbf{(Gaussian)}} \qquad {d}X_t = \overbrace{{{u_t}^{\theta} (X_t) {dt} }^\text{{\textbf{ODE}}}}](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B.5cm%5D%7B0%2C4%5Ctextwidth%7D+%7B%5Ctextbf%7BFlow+Model%7D%7D+%5Cend%7Bminipage%7D%7D+%5Cqquad+%7BP_%7Binit%7D%7D+%7B%5Ctextbf%7B%28Gaussian%29%7D%7D+%5Cqquad+%7Bd%7DX_t+%3D+%5Coverbrace%7B%7B%7Bu_t%7D%5E%7B%5Ctheta%7D+%28X_t%29+%7Bdt%7D+%7D%5E%5Ctext%7B%7B%5Ctextbf%7BODE%7D%7D%7D%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][.8cm]{0,7\textwidth} \textbf{Diffusion Model} \end{minipage}} \qquad {P_{init}} {\textbf{(Gaussian)}} \qquad {d}X_t = \overbrace{ {u_t}^{\theta} (X_t){dt} + \underbrace{{\sigma}_t {d} W_t}_\text{{\textbf{Diffusion Co-efficient}}} }^\text{{\textbf{SDE}}}](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B.8cm%5D%7B0%2C7%5Ctextwidth%7D+%5Ctextbf%7BDiffusion+Model%7D+%5Cend%7Bminipage%7D%7D+%5Cqquad+%7BP_%7Binit%7D%7D+%7B%5Ctextbf%7B%28Gaussian%29%7D%7D+%5Cqquad+%7Bd%7DX_t+%3D+%5Coverbrace%7B+%7Bu_t%7D%5E%7B%5Ctheta%7D+%28X_t%29%7Bdt%7D+%2B+%5Cunderbrace%7B%7B%5Csigma%7D_t+%7Bd%7D+W_t%7D_%5Ctext%7B%7B%5Ctextbf%7BDiffusion+Co-efficient%7D%7D%7D+%7D%5E%5Ctext%7B%7B%5Ctextbf%7BSDE%7D%7D%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Deriving a Training Target
Typically, we train the model by minimizing a mean-squared error

In regression or classification, the training target is the label. Here we have no label. We have to derive a training target.
The professor states that you don’t have to understand all the derivations. I anticipate some mathematics I haven’t studied earlier.
We have to make sure we understand the formulas for these.
![\begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Conditional \\ Probability Path}} \end{minipage} \qquad \begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Conditional \\ Vector field}} \end{minipage} \qquad \begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Conditional \\ Score Function}} \end{minipage}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BConditional+%5C%5C+Probability+Path%7D%7D+%5Cend%7Bminipage%7D++%5Cqquad+%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BConditional+%5C%5C+Vector+field%7D%7D+%5Cend%7Bminipage%7D+%5Cqquad+%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BConditional+%5C%5C+Score+Function%7D%7D+%5Cend%7Bminipage%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Marginal \\ Probability Path}} \end{minipage} \qquad \begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Marginal \\ Vector field}} \end{minipage} \qquad \begin{minipage}[t][.6cm]{0.9\textwidth} {\textbf{Marginal \\ Score Function}} \end{minipage}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BMarginal+%5C%5C+Probability+Path%7D%7D+%5Cend%7Bminipage%7D++%5Cqquad+%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BMarginal+%5C%5C+Vector+field%7D%7D+%5Cend%7Bminipage%7D+%5Cqquad+%5Cbegin%7Bminipage%7D%5Bt%5D%5B.6cm%5D%7B0.9%5Ctextwidth%7D+%7B%5Ctextbf%7BMarginal+%5C%5C+Score+Function%7D%7D+%5Cend%7Bminipage%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
The key terminology to remember are the following.
![\fbox{\begin{minipage}[t]{1,7\textwidth} \textbf{Conditional = Per Single data point \\ Marginal = Across distribution of data points } \end{minipage}}](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%7B1%2C7%5Ctextwidth%7D++%5Ctextbf%7BConditional+%3D+Per+Single+data+point+%5C%5C+Marginal+%3D+Across+distribution+of+data+points+%7D+%5Cend%7Bminipage%7D%7D++&bg=f0f0f0&fg=555555&s=4&c=20201002)
Conditional and Marginal Probability Path


This dirac distribution is not what I understand as of now. But it seems to return the same



Example : Gaussian Probability Path



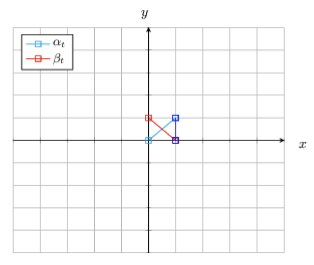
The diagram is small. But the idea is that when Time is 0, mean is 0 and variance is 1 which is 

The distributions with variance 1 is dirac,

Example : Marginal Probability Path 
Well. This is not clear at this stage. But we take one data point(sampling) from 


The density formula is not clear at this stage.
All of this seems to describe that we move from noise to our distribution of the data we are dealing with.

Conditional and Marginal Vector Field
Conditional Vector field 
We want to condition such that starting from initial point

then the distribution of t at every time point is given by this probablity path

We simulate the ODE like this.
Example : Conditional Gaussian Vector field


Marginalization trick
The marginal vector field is

Not very clear at this point but the following is the application of the Bayes’ rule to look at the posterior distribution. What could have been the data point from the point set Z that gave rise to X ?


then the distribution of t at every time point is given by this marginal path

Proof of Marginalization Trick
We start with the left side of the 
in the notes.

We can swap integrals and derivatives under certain conditions. Which conditions ?
This can be represented as the Continuity equation as applied to the Conditional Probability path.
What is the divergence operator ?
It seems to have applications in Physics. So it is not entirely clear.
But it is
Because since it is a sum we can move it outside.
Multiplying and dividing by the same quantity we get
I didn’t follow this but this satisfies the continuity equation.






Flow Matching
This is about learning the Marginal Vector field.
So we start with a neural net

Flow Matching Loss
Since the above is intractable we consider the the following.

But this loss is intractable. Look at notes above.

Conditional Flow Matching Loss
Theorem
The following image roughly shows the separation by a constant.


There are two implications
1.
2.
So it holds that the neural network equals the Marginal Vector Field.
I have to conclude this part before Lecture 3 as many loose threads have to tied up. That is pending.


Lecture 3
Reminder of what was converted in Lecture 2
Conditional Prob. Path, Vector field and Score.
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Conditional Probability Path}\end{minipage}} \qquad P_t(\bullet \mid z) \qquad \text{Interpolates } P_{init} \text{ and a data point } \qquad \mathcal{N}({\alpha}_t z, {{\beta}_t}^2 {I}_d)](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BConditional+Probability+Path%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+P_t%28%5Cbullet+%5Cmid+z%29+%5Cqquad+%5Ctext%7BInterpolates+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+%5Cmathcal%7BN%7D%28%7B%5Calpha%7D_t+z%2C+%7B%7B%5Cbeta%7D_t%7D%5E2+%7BI%7D_d%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Conditional Vector field}\end{minipage}} \qquad {U_t}^{target}(x \mid z) \qquad \text{ODE follows conditional path } P_{init} \text{ and a data point } \qquad \left({\dot{\alpha}}_t - \frac{{\dot{\beta}}_t}{\beta_t}{\alpha}_t\right) z + \left(\frac{{\dot{\beta}}_t}{\beta_t}\right) x](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BConditional+Vector+field%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%7BU_t%7D%5E%7Btarget%7D%28x+%5Cmid+z%29+%5Cqquad+%5Ctext%7BODE+follows+conditional+path+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+%5Cleft%28%7B%5Cdot%7B%5Calpha%7D%7D_t+-+%5Cfrac%7B%7B%5Cdot%7B%5Cbeta%7D%7D_t%7D%7B%5Cbeta_t%7D%7B%5Calpha%7D_t%5Cright%29+z+%2B+%5Cleft%28%5Cfrac%7B%7B%5Cdot%7B%5Cbeta%7D%7D_t%7D%7B%5Cbeta_t%7D%5Cright%29+x+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Conditional Score function}\end{minipage}} \qquad \nabla \log P_t(x \mid z) \qquad \text{Gradient of log likelihood } P_{init} \text{ and a data point } \qquad -\left(\frac{x - {\alpha}_t z}{{\beta}_t^2}\right)](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BConditional+Score+function%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%5Cnabla+%5Clog+P_t%28x+%5Cmid+z%29+%5Cqquad+%5Ctext%7BGradient+of+log+likelihood+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+-%5Cleft%28%5Cfrac%7Bx+-+%7B%5Calpha%7D_t+z%7D%7B%7B%5Cbeta%7D_t%5E2%7D%5Cright%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Marginal Prob. Path, Vector field and Score.
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Marginal probability path }\end{minipage}} \qquad P_t \qquad \text{Interpolates } P_{init} \text{ and a data point } \qquad P_t(x \mid z) P_{data} (z ) dz](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BMarginal+probability+path+%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+P_t+%5Cqquad+%5Ctext%7BInterpolates+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+P_t%28x+%5Cmid+z%29+P_%7Bdata%7D+%28z+%29+dz++&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Marginal vector field }\end{minipage}} \qquad {U_t}^{target}(x) \qquad \text{ODE follows marginal path } P_{init} \text{ and a data point } \qquad \int {U_t}^{target}(x \mid z) \left( \frac{P_t(x \mid z ) P_{data}(z)}{P_t(x)} \right) dz](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BMarginal+vector+field+%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%7BU_t%7D%5E%7Btarget%7D%28x%29+%5Cqquad+%5Ctext%7BODE+follows+marginal+path+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+%5Cint+%7BU_t%7D%5E%7Btarget%7D%28x+%5Cmid+z%29+%5Cleft%28+%5Cfrac%7BP_t%28x+%5Cmid+z+%29+P_%7Bdata%7D%28z%29%7D%7BP_t%28x%29%7D+%5Cright%29+dz+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Marginal Score function}\end{minipage}} \qquad \nabla \log P_t(x) \qquad \text{Can be used to convert ODE target to SDE target } P_{init} \text{ and a data point } \qquad \nabla \log P_t(x \mid z) \left(\frac{P_t(x \mid z ) P_{data}(z)}{P_t (x)}\right) dz](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BMarginal+Score+function%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%5Cnabla+%5Clog+P_t%28x%29+%5Cqquad+%5Ctext%7BCan+be+used+to+convert+ODE+target+to+SDE+target+%7D+P_%7Binit%7D+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+%5Cnabla+%5Clog+P_t%28x+%5Cmid+z%29+%5Cleft%28%5Cfrac%7BP_t%28x+%5Cmid+z+%29+P_%7Bdata%7D%28z%29%7D%7BP_t+%28x%29%7D%5Cright%29+dz+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Flow Matching
The goal of Flow matching training is to learn the Marginal Vector field.
What is Flow Matching loss ? It is a type of regression like this.
But since this is intractable ( Why ? ) we consider the Condition Flow Matching Loss




Recall
And
Now we can sample noise from Uniform Gaussian and add that up.
Noise is distributed over a Uniform Gaussian like this
I have to determine exactly how the formula shown above is derived.
These formulas too long for the renderer. There is also a negative sign below which I couldn’t understand.
Since
The following looks like the simples forumula one could explain during the interview.



![L_{CFM}(\theta) = \mathcal(E)_{t \sim Unif}\atop{z \sim P_{Data}, { \mathcal{N}({\alpha_t} z,{\beta_t}^2{I}_d)}} \left[ \lVert{U_t}^{theta} (x) - \left( \dot{\alpha_t} - {\frac{\dot{\beta_t}} {\beta_t}} \alpha_t \right) Z - {\frac{\dot{\beta_t}} {\beta_t}} X \rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=L_%7BCFM%7D%28%5Ctheta%29+%3D+%5Cmathcal%28E%29_%7Bt+%5Csim+Unif%7D%5Catop%7Bz+%5Csim+P_%7BData%7D%2C+%7B+%5Cmathcal%7BN%7D%28%7B%5Calpha_t%7D+z%2C%7B%5Cbeta_t%7D%5E2%7BI%7D_d%29%7D%7D+%5Cleft%5B+%5ClVert%7BU_t%7D%5E%7Btheta%7D+%28x%29+-+%5Cleft%28+%5Cdot%7B%5Calpha_t%7D+-+%7B%5Cfrac%7B%5Cdot%7B%5Cbeta_t%7D%7D+%7B%5Cbeta_t%7D%7D+%5Calpha_t+%5Cright%29+Z+-+%7B%5Cfrac%7B%5Cdot%7B%5Cbeta_t%7D%7D+%7B%5Cbeta_t%7D%7D+X+%5CrVert_2%5E2+%5Cright%5D&bg=f0f0f0&fg=555555&s=4&c=20201002)

![L_{CFM}(\theta) = \mathcal(E)_{t \sim Unif}\atop{z \sim P_{Data}, { \mathcal{N}({\alpha_t} z,{\beta_t}^2{I}_d)}} \left[ \lVert{U_t}^{theta} (x) \left({\alpha}_t z + {\beta}_t \epsilon \right) - \left( \dot{\alpha_t} z + \dot{\beta}_t \epsilon \right) \rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=L_%7BCFM%7D%28%5Ctheta%29+%3D+%5Cmathcal%28E%29_%7Bt+%5Csim+Unif%7D%5Catop%7Bz+%5Csim+P_%7BData%7D%2C+%7B+%5Cmathcal%7BN%7D%28%7B%5Calpha_t%7D+z%2C%7B%5Cbeta_t%7D%5E2%7BI%7D_d%29%7D%7D+%5Cleft%5B+%5ClVert%7BU_t%7D%5E%7Btheta%7D+%28x%29+%5Cleft%28%7B%5Calpha%7D_t+z+%2B+%7B%5Cbeta%7D_t+%5Cepsilon+%5Cright%29+-+%5Cleft%28+%5Cdot%7B%5Calpha_t%7D+z+%2B+%5Cdot%7B%5Cbeta%7D_t+%5Cepsilon+%5Cright%29+%5CrVert_2%5E2+%5Cright%5D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Flow Matching Training for CondOT Path}\end{minipage}}](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BFlow+Matching+Training+for+CondOT+Path%7D%5Cend%7Bminipage%7D%7D++&bg=f0f0f0&fg=555555&s=4&c=20201002)









Score Matching
Score Network

approximate
We have to show the same thing we dealt with above. Show that the marginal loss is same as the conditional loss upto a constant.

![\mathcal{L}_{SM} (\theta) = \mathcal(E) \left[ \lVert{S_t}^{theta} (x) - {\nabla \log P_t (x) }\rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BL%7D_%7BSM%7D+%28%5Ctheta%29+%3D+%5Cmathcal%28E%29+%5Cleft%5B+%5ClVert%7BS_t%7D%5E%7Btheta%7D+%28x%29+-+%7B%5Cnabla+%5Clog+P_t+%28x%29+%7D%5CrVert_2%5E2+%5Cright%5D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Denoising Score Matching Loss
The proof is similar to the Flow Matching lost and Flow Matching Conditional loss shown above.
![\mathcal{L}_{CSM} (\theta) = \mathcal(E) \left[ \lVert{S_t}^{theta} (x) - {\nabla \log P_t (x \mid z) }\rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BL%7D_%7BCSM%7D+%28%5Ctheta%29+%3D+%5Cmathcal%28E%29+%5Cleft%5B+%5ClVert%7BS_t%7D%5E%7Btheta%7D+%28x%29+-+%7B%5Cnabla+%5Clog+P_t+%28x+%5Cmid+z%29+%7D%5CrVert_2%5E2+%5Cright%5D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Denoising Score Matching For Gaussian Probability Path
Next we look at the Gaussian noise. If the Gaussian noise is scaled up by
it is going to have the distribution shown below.
We get the distribution
It is again similar to the Flow Matching formulas.
The instructor at this stage mentioned that the above formula predicts the noise that was injected and so it
is termed ‘Denoising’. I need to understand this better.




![\mathcal{L}_{DSM} (\theta) = \mathrm{E}_{t \sim Unif}\atop{z \sim P_{Data}}, { x \sim p(\bullet \mid z)} \left[ \lVert{S_t}^{\theta} (x) + \frac{x - {\alpha}_t z }{ {{\beta}_t}^2}\rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BL%7D_%7BDSM%7D+%28%5Ctheta%29+%3D+%5Cmathrm%7BE%7D_%7Bt+%5Csim+Unif%7D%5Catop%7Bz+%5Csim+P_%7BData%7D%7D%2C+%7B+x+%5Csim+p%28%5Cbullet+%5Cmid+z%29%7D+%5Cleft%5B+%5ClVert%7BS_t%7D%5E%7B%5Ctheta%7D+%28x%29+%2B+%5Cfrac%7Bx+-+%7B%5Calpha%7D_t+z+%7D%7B+%7B%7B%5Cbeta%7D_t%7D%5E2%7D%5CrVert_2%5E2+%5Cright%5D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\mathcal{L}_{DSM} (\theta) = \mathrm{E}_{t \sim Unif}\atop{z \sim P_{Data}}, { \epsilon \sim \mathcal{N}(0,{I}_d)} \left[ \lVert{S_t}^{\theta} ({\alpha}_t z + {\beta}_t \epsilon) + \frac{\epsilon}{ {\beta}_t }\rVert_2^2 \right]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BL%7D_%7BDSM%7D+%28%5Ctheta%29+%3D+%5Cmathrm%7BE%7D_%7Bt+%5Csim+Unif%7D%5Catop%7Bz+%5Csim+P_%7BData%7D%7D%2C+%7B+%5Cepsilon+%5Csim+%5Cmathcal%7BN%7D%280%2C%7BI%7D_d%29%7D+%5Cleft%5B+%5ClVert%7BS_t%7D%5E%7B%5Ctheta%7D+%28%7B%5Calpha%7D_t+z+%2B+%7B%5Cbeta%7D_t+%5Cepsilon%29+%2B+%5Cfrac%7B%5Cepsilon%7D%7B+%7B%5Cbeta%7D_t+%7D%5CrVert_2%5E2+%5Cright%5D+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Conditional and marginal Score function
Conditional Score

Derivation

Substituting the formula show previously we get this after moving the gradient inside the integral.

Using the result


What is the score of the Conditional Gaussian Vector Field ?

Theorem : SDE extension trick


![{X_0 \sim {P_{init}}} , d{X_t} = \left[ {{u_t}^{target} (X_t)} + {\frac {{\alpha_t}^2}{2}} \nabla {\log {P_t( X_t )}} \right] dt + {\alpha_t} d{W_t} \Rightarrow {X_t \sim P_t}, {0 \leq t \leq 1}](https://s0.wp.com/latex.php?latex=%7BX_0+%5Csim+%7BP_%7Binit%7D%7D%7D+%2C+d%7BX_t%7D+%3D+%5Cleft%5B++%7B%7Bu_t%7D%5E%7Btarget%7D+%28X_t%29%7D+%2B+%7B%5Cfrac+%7B%7B%5Calpha_t%7D%5E2%7D%7B2%7D%7D+%5Cnabla+%7B%5Clog++%7BP_t%28+X_t+%29%7D%7D+%5Cright%5D+dt+%2B+%7B%5Calpha_t%7D+d%7BW_t%7D+%5CRightarrow+%7BX_t+%5Csim+P_t%7D%2C+%7B0+%5Cleq+t+%5Cleq+1%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)

Lecture 4






A Guided CFM objective






Classifier-free Guidance



Fact ( Unable to understand the proper reason for the following equation )

Bayes’ Rule
This procedure is for Classifier-free Guidance.










Classifier-free guidance sampling
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Classifiere-free guidance sampling Procedure }\end{minipage}}](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BClassifiere-free+guidance+sampling+Procedure+%7D%5Cend%7Bminipage%7D%7D+&bg=f0f0f0&fg=555555&s=4&c=20201002)




![\textbf{ Simulate } dX_t \left[ ( 1- w ) {U_t}^{\theta} (X_t \mid \Phi ) + w {U_t}^{\theta} (X_t \mid y ) \right] dt \text{ from } t = 0 to t = 1](https://s0.wp.com/latex.php?latex=%5Ctextbf%7B+Simulate+%7D+dX_t+%5Cleft%5B+%28+1-+w+%29+%7BU_t%7D%5E%7B%5Ctheta%7D+%28X_t+%5Cmid+%5CPhi+%29+%2B+w+%7BU_t%7D%5E%7B%5Ctheta%7D+%28X_t+%5Cmid+y+%29+%5Cright%5D+dt+%5Ctext%7B+from+%7D+t+%3D+0+to+t+%3D+1&bg=f0f0f0&fg=555555&s=4&c=20201002)
Lecture 4
It starts with this. What is a Score function ?
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Marginal probability path }\end{minipage}} \qquad P_t (x) \qquad \text{Conditional probability path } \qquad P_t(x \mid z)](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BMarginal+probability+path+%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+P_t+%28x%29+%5Cqquad+%5Ctext%7BConditional+probability+path+%7D++%5Cqquad+P_t%28x+%5Cmid+z%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Marginal Score }\end{minipage}} \qquad \nabla \log P_t(x \mid z) \qquad \text{Conditional Score } \qquad \nabla \log P_t(x)](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BMarginal+Score+%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%5Cnabla+%5Clog+P_t%28x+%5Cmid+z%29+%5Cqquad+%5Ctext%7BConditional+Score+%7D++%5Cqquad+%5Cnabla+%5Clog+P_t%28x%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Proof
We use this rule.
Gradient log of the marginal is the Gradient of the function divided by the function itself.
Swap the derivative and integral. Which is the derivative ?
Apply the rule( shown in the first line) in reverse.
At this stage we are asked to read the notes. But the gist is that these two Gaussian examples





are similar but have slightly different weights.
So we can map them using algebra which leads to this Reparameterization
![\fbox{\begin{minipage}[t][2cm]{0,35\textwidth}\centering \small \textbf{Conditional Vector field}\end{minipage}} \qquad {U_t}^{target}(x \mid z) \qquad \text{ODE follows conditional path } P_{init} \\ \text{ and a data point } \qquad \left({\dot{\alpha}}_t - \frac{{\dot{\beta}}_t}{\beta_t}{\alpha}_t\right) z + \left(\frac{{\dot{\beta}}_t}{\beta_t}\right) x](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B2cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BConditional+Vector+field%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%7BU_t%7D%5E%7Btarget%7D%28x+%5Cmid+z%29+%5Cqquad+%5Ctext%7BODE+follows+conditional+path+%7D+P_%7Binit%7D+%5C%5C+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+%5Cleft%28%7B%5Cdot%7B%5Calpha%7D%7D_t+-+%5Cfrac%7B%7B%5Cdot%7B%5Cbeta%7D%7D_t%7D%7B%5Cbeta_t%7D%7B%5Calpha%7D_t%5Cright%29+z+%2B+%5Cleft%28%5Cfrac%7B%7B%5Cdot%7B%5Cbeta%7D%7D_t%7D%7B%5Cbeta_t%7D%5Cright%29+x+&bg=f0f0f0&fg=555555&s=4&c=20201002)
![\fbox{\begin{minipage}[t][1cm]{0,35\textwidth}\centering \small \textbf{Conditional Score function}\end{minipage}} \qquad \nabla \log P_t(x \mid z) \qquad \text{Gradient of log likelihood } P_{init} \\ \text{ and a data point } \qquad -\left(\frac{x -{\alpha}_t z}{{\beta}_t^2}\right)](https://s0.wp.com/latex.php?latex=%5Cfbox%7B%5Cbegin%7Bminipage%7D%5Bt%5D%5B1cm%5D%7B0%2C35%5Ctextwidth%7D%5Ccentering+%5Csmall+%5Ctextbf%7BConditional+Score+function%7D%5Cend%7Bminipage%7D%7D+%5Cqquad+%5Cnabla+%5Clog+P_t%28x+%5Cmid+z%29+%5Cqquad+%5Ctext%7BGradient+of+log+likelihood+%7D+P_%7Binit%7D+%5C%5C+%5Ctext%7B+and+a+data+point+%7D+%5Cqquad+-%5Cleft%28%5Cfrac%7Bx+-%7B%5Calpha%7D_t+z%7D%7B%7B%5Cbeta%7D_t%5E2%7D%5Cright%29+&bg=f0f0f0&fg=555555&s=4&c=20201002)
Reparameterization 
This proof is in the notes. It seems that early Diffusion models learnt the Score function and transformed it into a Vector field.
Score Matching


Key Points
Learning the marginal vector field and learning the Score function are equivalent for Gaussian Probability Paths.
Denoising score matching is a simple way of learning Marginal Score functions by approximating Conditional Score Functions.
Sampling with score models is achieved by adding the desired amount of noise and applying correction to the vector field.
